 ctopus
ctopus
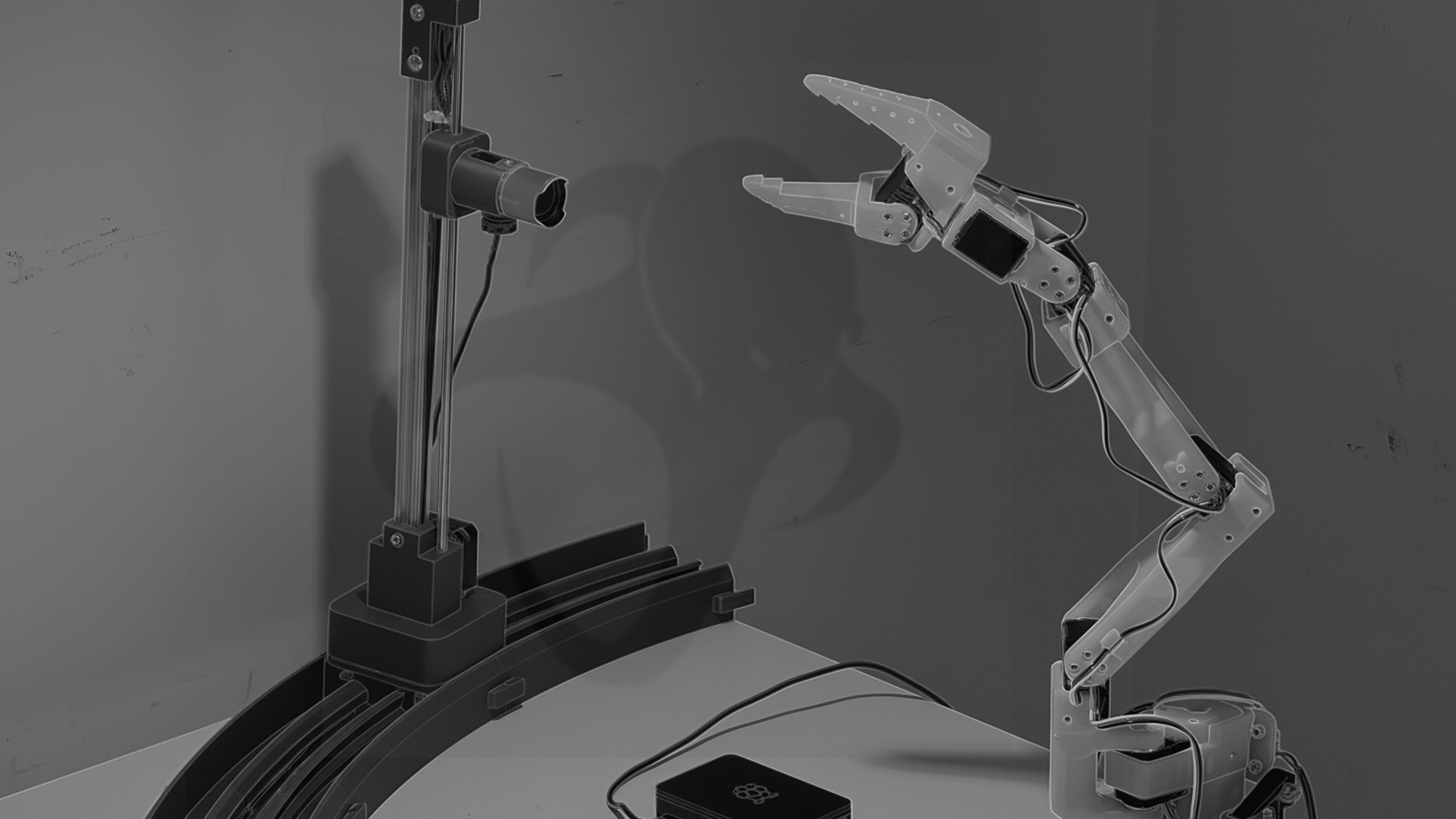
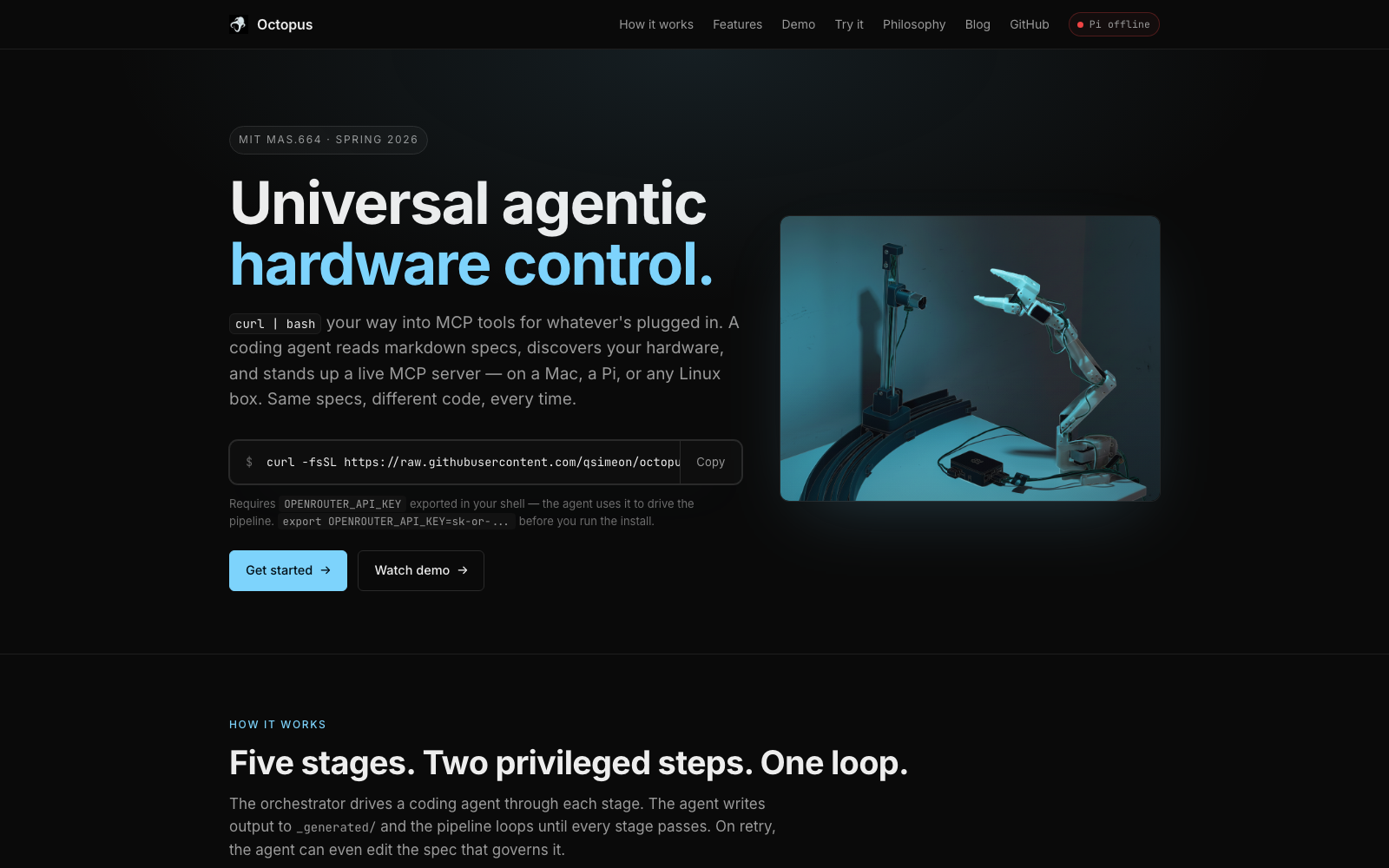
Universal agentic hardware control —
one install command, any device.
qsimeon.github.io/octopus-hw
The problem
Hardware doesn't ship agent-callable APIs.


?
→
an agent surface that doesn't exist yet
Every appliance, lab instrument, robot arm, sensor rig, smart-home device — anything with a microcontroller — should be agent-controllable. Drivers and SDKs are written one device at a time, by humans, for one OS. The MCP explosion in software hasn't reached hardware.
Team & traction
Open. Live. Available right now.

MIT

Harvard

Harvard

Vision
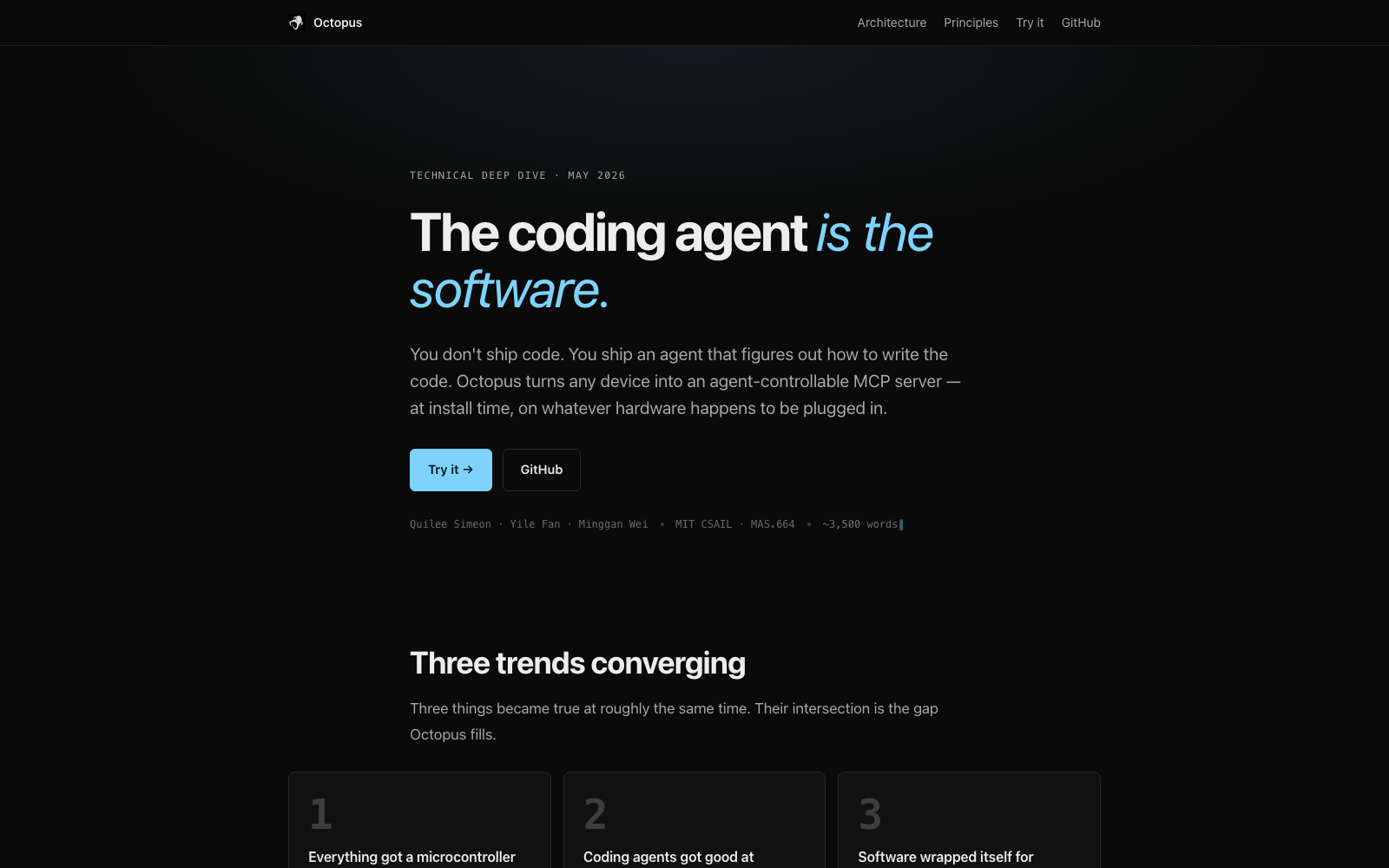
The agentic OS for the physical world.
HTTP for hardware agents. One protocol, any device.
Coding agents are the new OS. Prompts are the instruction set.
Thousands of embodied devices. One install command.
Honest open work
Where we are. Where this goes.
Today — limitations

Robust over fast. Same install, same hardware, two slightly different generated servers. Stochastic by default — deterministic when it matters.

Speed. ~25-min installs are too slow for casual demos. Caching + warm starts.

Vibe-code bloat → local-first. Built fast, accumulated cruft; simplification + on-device agents next. Pi-class hardware should run a Pi-class agent.
Next — where this goes
Distributed device catalog. Every install learns. Meta-learning across deployments → a shared, sharper spec library.

Self-perception, both faces. Daemon watches its logs; camera watches the arm. Extend both with what we learn.

Robotics + agentic control. Like a virus learning to infect more hardware — closing the gap from VLM to action.

Customer capture. Become for embodied devices what Uber became for rideshare — the easy way in, with the network effect.